
۲۰ مهر ۱۴۰۴
اخبار پزشکی سلامت
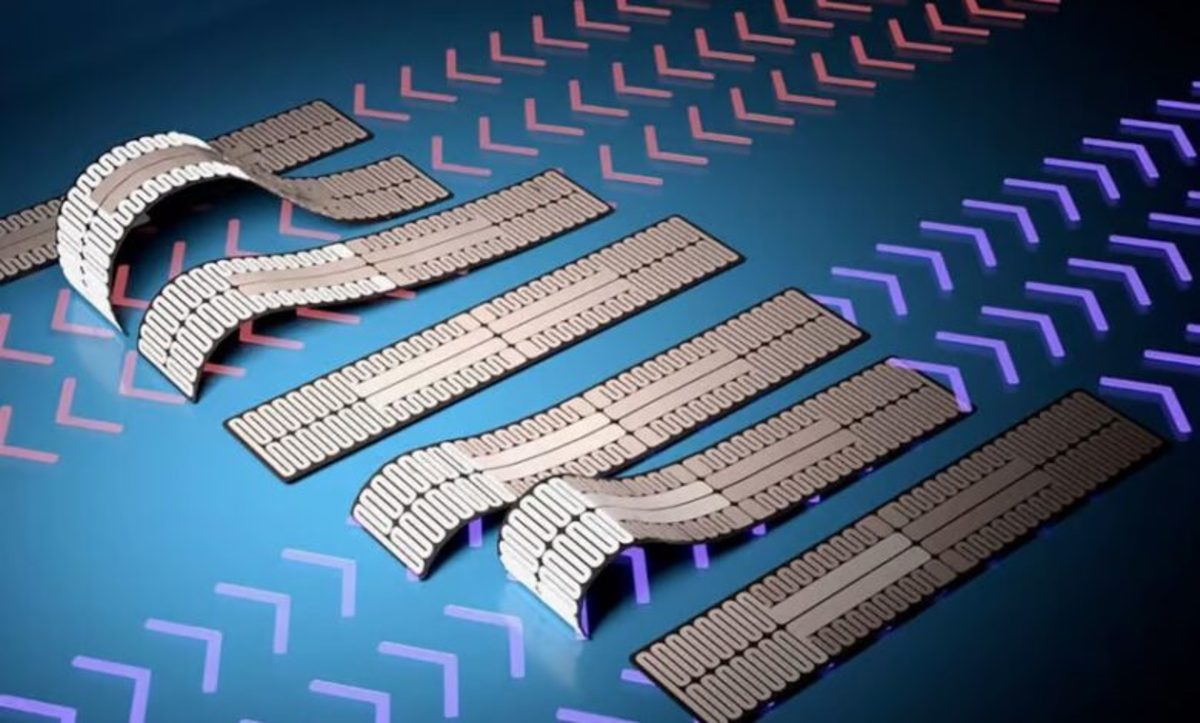
به گزارش مجله خبری نگار، این ربات نرم تن با طول ۹ سانتی متر در دانشگاه ایالتی کارولینای شمالی توسط تیمی به سرپرستی پروفسور یونگ ژو (Yong Zhu) در حال توسعه است. این ربات با الهام از کرم شب پره مرواریدی (Pleurotya ruralis) ساخته شده است. مانند سایر کرم ها، این ربات با پیچاندن متوالی بخشهایی از بدن خود به جلو یا عقب حرکت میکند. برای این کار، بدن خود را مانند حلقه از جلو به عقب یا از عقب به جلو حرکت میدهد. جالب اینجاست که این ربات کرم مانند از عضلات خود برای انجام این کار استفاده کرده و از گرمکنهای نانوسیمی بهره میبرد.
به گفته سازندگان، بدنه آن از دو لایه انباشته از پلیمرهای مختلف ساخته شده است که یکی در بالا با گرم شدن منبسط میشود، در حالی که لایه پایین با گرم شدن منقبض میشود. در لایه بالایی شبکهای از نانوسیمهای نقرهای تعبیه شده که دارای چندین نقطه سرب در طول ربات است.
هنگامی که جریان الکتریکی در هر یک از آن نقاط اعمال میشود، نانوسیمهای موجود در آن ناحیه گرم شده و در نتیجه پلیمر اطراف خود را گرم میکنند. این موضوع باعث میشود بدن ربات فقط در آن ناحیه به سمت بالا خم شود.بنابراین، با اعمال متوالی یک جریان به چندین نقطه سرب مجاور، میتوان یک حلقه ایجاد کرد که در هر جهت از بدنه عبور کند.
شوانگ وو (Shuang Wu) محقق فوق دکترا و پژوهشگر ارشد این مطالعه گفت: ما نشان دادیم که ربات ما قادر است خود را به جلو کسیده و به عقب هل دهد. به طور کلی، هرچه جریان بیشتری اعمال کنیم، سریعتر در هر جهت حرکت میکند. با این حال، ما متوجه شدیم که یک چرخه بهینه وجود دارد که به پلیمر زمان میدهد تا خنک شود بنابراین به طور مؤثری به عضله اجازه میدهد قبل از انقباض دوباره شل شود.
با فعال کردن انتخابی گرمکنهای نانوسیمی در جلو و عقب ربات، محققان توانستند آن را از یک شکاف ۳۰ میلیمتری با ارتفاع تنها ۳ میلیمتر عبور دهند.
ژو در پایان میگوید: این رویکرد برای حرکت در یک ربات نرم تن بسیار کارآمد است و ما علاقهمندیم راههایی را بررسی کنیم که بتوانیم این فرآیند را کارآمدتر کنیم. گامهای بعدی شامل ادغام این رویکرد برای حرکت روباتهای نرم با حسگرها یا سایر فناوریها برای استفاده در برنامههای مختلف مانند دستگاههای جستجو و نجات است.


























































 در عراق")










































