
۳۰ ارديبهشت ۱۴۰۳
۲۲ فروردين ۱۴۰۳ - ۱۲:۵۱
این فنر از ماهیچههای طبیعی تقلید میکند!
مهندسان MIT فنر جدیدی ساختهاند که از ماهیچههای طبیعی تقلید میکند و به عنوان یک اسکلت برای روباتهای نرم و عضلانی کاربرد دارد.
به گزارش مجله خبری نگار،ماهیچههای ما عملگرهای مکانیکی (اکتواتور) کامل طبیعت هستند، چون انرژی را به حرکت تبدیل میکنند. فیبرهای عضلانی با توجه به اندازه خود، قویتر و دقیقتر از اکثر عملگرهای مکانیکی مصنوعی هستند. آنها حتی میتوانند آسیب را درمان کنند و با ورزش قویتر شوند.
به این دلایل، محققان در حال بررسی راههایی برای نیرو دادن به روباتها با عضلات طبیعی هستند. آنها تعداد انگشتشماری از روباتهای «بیوهیبرید» یا «دوگانه زیستی» را نشان دادهاند که از محرکهای عضلانی برای نیرو دادن به اسکلتهای مصنوعی استفاده میکنند که راه میروند، شنا میکنند، خودشان را باد میکنند و اشیاء را میگیرند. اما نیرو دادن به روباتها کاملا با هم متفاوت است و هیچ طرح کلی وجود ندارد که نشان دهد روباتها بیشترین بهره را از چه نوع ماهیچهای میگیرند.
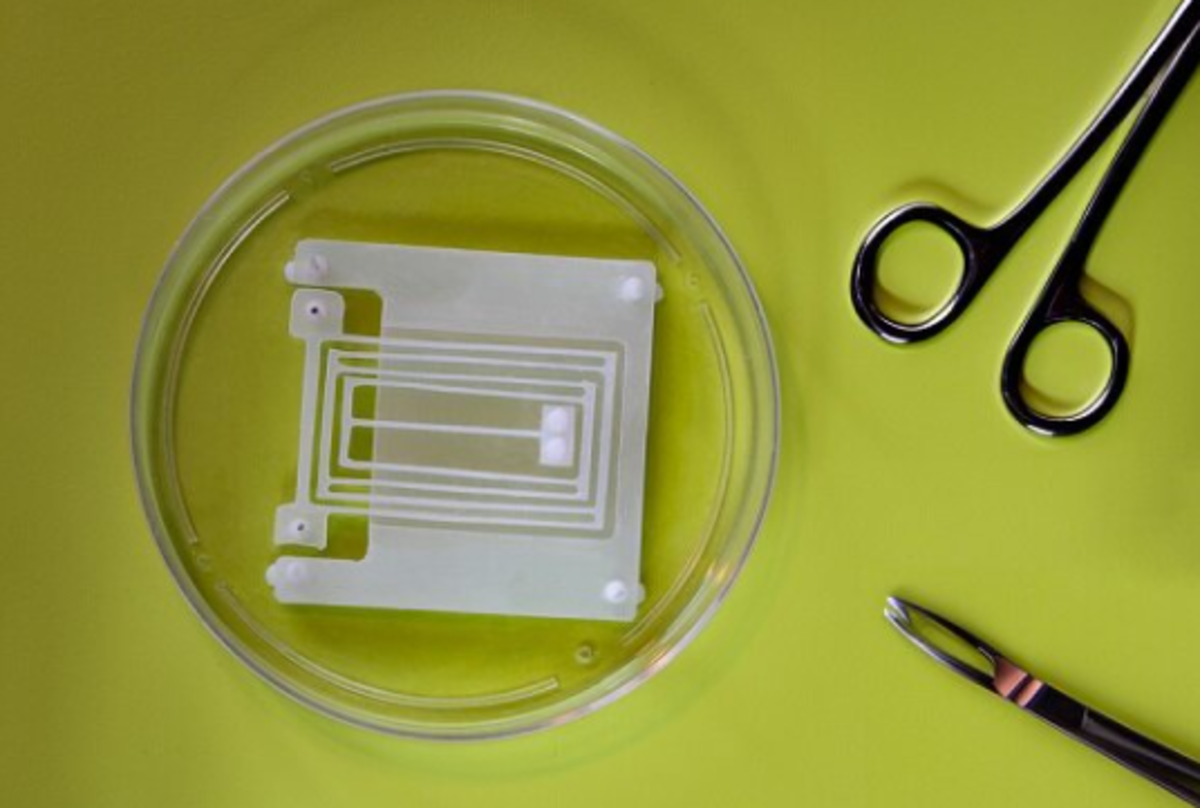
اکنون، مهندسان MIT یک دستگاه فنر مانند ساختهاند که میتواند به عنوان یک ماژول اسکلت مانند برای هر روبات عضلانی استفاده شود. فنر جدید یا «فلکسور» به گونهای طراحی شده است که بیشترین کار را از هر بافت عضلانی متصل انجام دهد. مانند یک پرس پا که با وزن مناسب سازگار است و میزان حرکتی را که یک عضله میتواند به طور طبیعی ایجاد کند به حداکثر میرساند.
محققان دریافتند هنگامی که حلقهای از بافت عضلانی را روی دستگاه قرار میدهند، دقیقاً مانند یک نوار لاستیکی که در اطراف ۲ پایه کشیده شده است، عضله به طور قابل اعتماد و مکرر فنر را میکشد و در مقایسه با سایر طراحیهای قبلی دستگاه، آن را پنج برابر بیشتر میکشد.
این تیم طراحی خمشی را به عنوان یک بلوک ساختمانی جدید میبیند که میتواند با سایر فلکسورها ترکیب شود تا هر گونه پیکربندی از اسکلتهای مصنوعی بسازد. محققان بعدها میتوانند اسکلتها را با بافتهای ماهیچهای برای تقویت حرکاتشان هماهنگ کنند.
محققان میگویند: این فلکسورها مانند اسکلتی هستند که مردم اکنون میتوانند از آن برای تبدیل تحریک عضلات به درجات مختلف آزادی حرکت به روشی بسیار قابل پیشبینی استفاده کنند. ما به متخصصان روباتیک مجموعهای از قوانین جدید میدهیم تا روباتهای قدرتمند و دقیقی با قدرت عضله بسازند که کارهای جالبی انجام دهند.
کشش عضلانی
بافت عضلانی وقتی در یک پتری دیش در شرایط مساعد تنها رها میشود، خود به خود منقبض میشود، اما در جهتهایی که کاملاً قابل پیشبینی نیستند یا کاربرد زیادی ندارند. در واقع، اگر ماهیچه به چیزی متصل نباشد، حرکت زیادی میکند، اما با تنوع بسیار زیاد، جایی که فقط در مایع میچرخد.
برای اینکه یک عضله مانند یک عملگر مکانیکی کار کند، مهندسان معمولاً نواری از بافت عضلانی را بین ۲ بست کوچک و انعطافپذیر متصل میکنند. همانطور که نوار عضلانی به طور طبیعی منقبض میشود، میتواند ستونها را خم کند و بکشد و حرکتی ایجاد کند که در حالت ایدهآل بخشی از اسکلت روباتیک را نیرو میدهد. اما در این طرحها، ماهیچهها حرکت محدودی ایجاد میکنند، عمدتاً به این دلیل که بافتها در نحوه تماسشان با بستها بسیار متغیر هستند. بسته به اینکه ماهیچهها در کجا قرار میگیرند و چه مقدار از سطح عضله با ستون تماس میگیرد، ماهیچهها ممکن است موفق شوند ستونها را به هم بچسبانند، اما در مواقع دیگر ممکن است به روشهای غیرقابل کنترلی تکان بخورند.
گروه تحقیقاتی MIT به دنبال طراحی اسکلتی بودند که انقباضات عضله را بدون توجه به اینکه دقیقا کجا و چگونه روی اسکلت قرار میگیرد متمرکز و به حداکثر میرساند تا بیشترین حرکت را به روشی قابل پیشبینی و قابل اعتماد ایجاد کند.
محققان ابتدا جهات متعددی را که یک عضله میتواند به طور طبیعی حرکت کند، در نظر گرفتند و استدلال کردند که اگر قرار است عضلهای ۲ پایه را در جهت خاصی به هم بکشد، میلهها باید به فنری متصل شوند که فقط در صورت کشیده شدن به آنها اجازه میدهد در آن جهت حرکت کنند.
محققان میگویند: ما به وسیلهای نیاز داریم که در یک جهت بسیار نرم و انعطافپذیر باشد و در همه جهات بسیار سفت باشد، به طوری که وقتی یک عضله منقبض میشود، تمام آن نیرو به طور مؤثر در یک جهت به حرکت تبدیل میشود.
انعطافپذیری
محققان MIT در طراحی و ساخت عناصر ماشینی مانند محرکهای مینیاتوری، یاتاقانها و مکانیسمهای دیگری متخصص هستند که میتوانند در ماشینها و سیستمها تعبیه شوند تا حرکت، اندازهگیری و کنترل فوقالعاده دقیق را برای طیف گستردهای از کاربردها فعال کنند. در میان عناصر ماشینکاری دقیق این گروه، خمشها هستند؛ یعنی دستگاههای فنر مانند، که اغلب از تیرهای موازی ساخته میشوند و میتوانند با دقت نانومتری خم شوند و کشیده شوند.
آنها فلکسوری را طراحی کنند که به طور خاص با پیکربندی و سفتی طراحی شده است تا بافت عضلانی را قادر سازد به طور طبیعی منقبض شود و فنر را به حداکثر برساند. این تیم پیکربندی و ابعاد دستگاه را بر اساس محاسبات متعدد طراحی کردند.
فلکسوری که آنها در نهایت طراحی کردند شبیه سازهای مینیاتوری و آکاردئونی مانند است که گوشههای آن توسط یک پایه کوچک به یک پایه زیرین چسبانده شده است و در نزدیکی یک پایه همسایه قرار دارد که مستقیماً روی پایه قرار میگیرد. سپس یک نوار عضله را دور ۲ ستون گوشه پیچیدند (تیم باندها را از فیبرهای عضلانی زنده که از سلولهای موش رشد میکردند، ساختند)، و اندازهگیری کردند که با انقباض نوار عضلانی چقدر به هم نزدیک میشوند.
این تیم متوجه شد که پیکربندی خمش، نوار عضلانی را قادر میسازد تا بیشتر در جهت بین ۲ بست منقبض شود. این انقباض متمرکز به عضله اجازه میدهد تا بستها را بسیار نزدیکتر به هم بکشد - پنج برابر نزدیکتر - در مقایسه با طراحیهای قبلی محرک عضلانی.
محققان میگویند: فلکسور اسکلتی است که ما آن را به گونهای طراحی کردیم که در یک جهت بسیار نرم و انعطافپذیر باشد و در همه جهات بسیار سفت باشد. وقتی عضله منقبض میشود، تمام نیرو به حرکت در آن جهت تبدیل میشود.
محققان دریافتند که میتوانند از این دستگاه برای اندازهگیری دقیق عملکرد و استقامت عضلات استفاده کنند. هنگامی که آنها فرکانس انقباضات عضلانی را تغییر دادند (به عنوان مثال، تحریک نوارها برای انقباض یک بار در مقابل چهار بار در ثانیه)، مشاهده کردند که عضلات در فرکانسهای بالاتر «خسته میشوند» و کشش زیادی ایجاد نمیکنند.
آنها میگویند: به سرعت خسته شدن ماهیچههایمان و اینکه چگونه میتوانیم آنها را تمرین کنیم تا پاسخهای استقامتی بالایی داشته باشیم، چیزی است که میتوانیم با این پلتفرم کشف کنیم.
محققان اکنون در حال تطبیق و ترکیب فلکسورها برای ساخت روباتهای دقیق، مفصل و قابل اعتماد هستند که با عضلات طبیعی کار میکنند.
آنها میگویند: نمونهای از روباتی که ما در تلاش برای ساختن آن در آینده هستیم، یک روبات جراحی است که میتواند روشهای کم تهاجمی را در داخل بدن انجام دهد. از نظر فنی، ماهیچهها میتوانند روباتهایی با هر اندازهای را تامین کنند، اما بهویژه در ساخت روباتهای کوچک هیجانزده هستیم، زیرا این جایی است که محرکهای بیولوژیکی از نظر قدرت، کارایی و سازگاری برتر هستند.
لینک کپی شد





۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳
 با همت شهرداری در بجنورد")
۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳

۳۰ ارديبهشت ۱۴۰۳



- کینه ستاره سابق لیگ برتر از پدر هالند به بچه غول رسید
- طعنه سنگین ستاره سابق نراتزوری به مدافع بانوی پیر با شیر و گربه! + عکس
- ژاوی از چشم مدیران بلوگرانا افتاد!
- جنازهای که نگذاشت بعثیها در ایران بمانند
- در زمان گل کمپانی، از راجرز به خاطر تعویض نکردن مدیسون عصبانی بودن
- ۳ کتابی که حاج حسین یکتا مطالعه آنها را پیشنهاد میکند
- علی غلامی: تندترین منتقدان حجاب را به تلویزیون ملی بیاورید
- ریوالدو: در زمان ما بازیکنان بالای ۳۰ سال زا میفروختند
- پیدا و پنهان نمایشگاه| پول بدهید تا به دیدار مخاطبانم بیایم!
- افشای هدف بکام از آوردن مسی به آمریکا
- بازیکن خشنی که ناجی مردمان کشورش شد + عکس
- پپ نبوغ ندارد هر مربی معمولی هم با این بازیکنان میتوانست فاتح جامها شود
- این انیمه پرطرفدار ژاپنی هم به لیگ جزیره رفت + عکس
- متلاشی شدن شبکه شیطان پرستی؛ دستگیری ۲۶۴ زن و مرد + فیلم
- بیماران پروانهای در پیله زخم و تحریم
- طبیعت ایران مدیون این آقا معلم است
- صحبتهای رئیس هیات فوتبال استان کرمان در خصوص فساد در باشگاه کرمانی
- گرهچینی؛ هنری برای احیای سنتهای بروجرد
- اختراع بانوی فناور و دانشمند تبریزی برای نجات مردم و حیات دوباره
- به سه دلیل ناگزیریم به سمت خودروهای برقی برویم
- جدیدترین توافق درباره چگونگی ثبت موجودی طلافروشان در سامانه تجارت
- دلایل جهش بیت کوین به قله تاریخی
- بازار طلا، سکه نیست
- بازار طلا در پاییز سکه شد
- افت شدید انتظارات تورمی در بازار ارز
- طراحی نقشه راه جدید بازار ارز و طلای کشور
- حمله سهجانبه به بازار ارز
- فرمان مدیریت ارزی چگونه به میرداماد بازگشت
- نشانههای تداوم ثبات در بازار ارز
- آیا کرونا بازگشته است؟ سوغات سفرهای تابستانی سرماخوردگی، کرونا یا آنفلوانزا؟
- پاندمی هنوز تمام نشده، در دوره آتشبس با کرونا هستیم
- نگرانیها درباره شیوع سویه اریس کرونا
- دوز یادآور واکنش کرونا بهروزرسانی شود
- کرونا دلیجان را قرمز کرد
- اوجگیری مجدد کرونا در زمستان؟
- ژن ضد ویروسی در بدن انسان وجود دارد؟
- آمار جدید مبتلایان و فوتیهای کرونا در شبانهروز گذشته
- چند درصد دانشآموزان واکسن کرونا تزریق کردهاند؟
- برای کاهش شدت بیماری کرونا بینی خود را با آب نمک شستشو دهید
- توصیههای جدید CDC برای مقابله با ویروس کرونا
- امکان مواجهه با پاندمیهای جدید وجود دارد
- از ۱۱ سویه کدام مسریتر است؟
- افزایش آمار روزانه مبتلایان کرونا در هند
- شناسایی ۱۷۹ بیمار جدید کووید۱۹ در کشور
- تزریق بیش از ۲۰ هزار دز واکسن در شبانه روز گذشته
- احتمال شکلگیری پیک کرونا در سه ماه آینده/فقط ۱۶ درصد از دانشآموزان ۵ تا ۱۱ سال واکسینه شدن
- آخرین رنگبندی کرونایی شهرهای کشور/ افزایش تعداد شهرهای آبی
- هشدار به افرادی که ۳ دوز واکسن نزده اند: محرومیت از خدمات!
- کرونا مانند بیماری آنفلوانزا خواهد شد/ واکسیناسیون کرونا در سالهای آینده داوطلبانه میشود
- سایه تامین مالی دولت بر سر بورس سنگینی میکند
- کاهش بی سابقه حجم معاملات سهام در بورسهای جهانی
- رشد شاخصهای بورس با کمک بانکیها و اعلام نرخ تسعیر ارز
- حمله به سفیر روسیه در لهستان
- معرفی سری گوشیهای Redmi K ۵۰ قبل از رونمایی رسمی
- غفوری: فکر کردن به قهرمانی از الان، سادهلوحانه است
- کاهش ۱۰ درصدی تولید هوندا در دو کارخانه
- سومین نشست دستمزد، باز هم بدون نتیجه
- لغو بلیت فروشی عمومی المپیک زمستانی چین
- گرامیداشت قربانیان هواپیمای اوکراینی در دانشگاه تورنتو
- ادامه چانهزنی چهارگانه در وین
- صرفهجویی ۱.۶ میلیارد دلاری کمیته برگزاری المپیک و پارالمپیک توکیو
- محبوبترین رشته المپیک توکیو مشخص شد
- اعلام هزینه میزبانی توکیو از المپیک و پارالمپیک ۲۰۲۰،
- آذرتاج: هیات اقتصادی جمهوری آذربایجان به ایران میرود
- بررسی عملکرد ایران در المپیک؛ جایگاه چهارمی در آسیا
- پایان وضعیت اضطراری در کشور میزبان المپیک ۲۰۲۰
- ماجرای دوچرخهی المپیک به وزیر کشیده شد/ بهتاج: امیدوارم ختم به خیر شود
- تمجید رییس کمیته پارالمپیک آسیا از نتایج ورزشکاران ایران در توکیو
- تابع: پیشبینیهای ما در خصوص مدالهای طلای پارالمپیک محقق شد
- لیموچی: عملکرد زنان ورزشکار ایران در پارالمپیک درخشان بود
- رضایی: کاروان ایران نمره قبولی خود را در پارالمپیک توکیو کسب کرد
- رژه پوشش اسلامی پیش چشم جهانیان
- صالحی امیری: آوردگاه توکیو میدان درخشش انسانهای مظلوم، ولی مقتدر بود
- برترین فرنگیکاران جهان معرفی شدند/ «محمدرضا گرایی» در صدر ایستاد
- چین قهرمان بازیهای پارالمپیک شد/ ایران در رده سیزدهم قرار گرفت
- پارالمپیک ۲۰۲۰| جوانمردی پرچمدار کاروان ایران در مراسم اختتامیه
- ساره جوانمردی پرچمدار ایران در اختتامیه پارالمپیک شد
- پیروزی رایحه شهاب در جدول شانس مجدد رقابتهای پاراتکواندو
- «عزیزی اقدم» به نیمه نهایی رقابتهای پاراتکواندو رسید
- پژوهشی ۲۸ ساله خواص بینظیر روغن زیتون را تایید کرد
- قراردادهای کار با اجرایی شدن لایحه امنیت شغلی ساماندهی میشوند
- اما و اگرهای استخدام «غیربومیها» در فولاد قاینات
- لزوم بهرهگیری از ظرفیت دستگاههای مسؤول در اجرای طرح «نور»
- نشانههای خطرناک در زنان باردار؛ اقدامات لازم در زمان دردهای بارداری
- دریاچه ارومیه در مسیر احیا یا آبگیری موقت؟
- بیم پنهان ماندن وضعیت کارخانه زباله سوز ساری از رئیس جمهور
- کمبود یک میلیون مسکن در تهران؛ پایتخت در رتبه ۶ تورم!
- آقای استاندار؛ امروز شما در لبه تصمیمی بزرگ ایستاده اید
- فینالهای اروپایی فصل ۲۴-۲۰۲۳ در دستان مربیان ایتالیایی
- خروجی و ورودی در مدیریتی و مربیگری قرمزهای مرسیساید مشخص شد
- دستمزد امباپه از ستارگان دیگر لوسبلانکوس بیشتر خواهد بود؟!
- رئیس مرکز پژوهشهای مجلس: فضای مجازی آدمها را باسواد نمیکند
- پرز: ما منحصر به فرد هستیم و پیروزیها بیشتری میخواهیم
- تیم قطری هم وارد دعوای پیاسجی و امباپه شد + عکس
- مردمی که یک صدا توپ طلا را برای وینیسیوس طلب کردند
- سرمایهگذار مشهور ایتالیایی در پی ورود به سن سیرو است
- ۶ عملکرد مثبت عقابها که با ورود گلاسنر رقم خورد
- جام نبردن ۴۰ میلیون یورو سود برای بارسا داشت!؟
- بازیکن جنجالی الهلال این بار هم با روح و روان رونالدو و بنزما بازی کرد + عکس
- جای خالی کارتخوان در مطب برخی پزشکان؛ این تخلف کی پایان مییابد؟
- درآمدهای پایدار بودجه از سال ۱۴۰۱ چقدر رشد کرد؟
- سفر نچیروان بارزانی به ایران چه پیامی برای غرب داشت؟
- پایتخت نفتی کانادا در یک قدمی شعلههای آتش
- اکثریت مردم آمریکا ترامپ را پنهانکار میدانند
- روایت محسنی اژهای از کتابی که این روزها میخواند
- از تحقیر با آفتابهسازی تا جهش نفتی دانشبنیانها
- عوارض آلایندگی در "باقرشهر" آلودهترین شهر حذف شده است
- زیان اقتصادی آلمان از نبود کارگران ماهر
- روز مادر سرزمین چکمه در سن سیرو متفاوت بود + عکس
- آورده چند میلیون دلاری سوگلیهای شیلاتی در مازندران
- اشک حکیمی از رقتن امباپه درآمد + عکس
- فیلم | سیلاب تمام روستای شوریجه علیا سرخس را فرا گرفت
- بایدن، ترامپ را به مناظره رو در رو طلبید
- افراطیهای پاریس امباپه و برادرش در باربکیو ملاقات کردند
- نیروی نوشتن! چرایی اصرار روانشناسها بر نوشتن افکار و اهداف روی کاغذ
- توضیحات عضوهیات رئیسه مجلس درباره برنامه مجلس برای تعطیلی دو روز در هفته
- عاشقانهای از امدادگر کوهستان| عملیات سختی که با تشکر کودکانه شیرین شد
- گذری بر اسرار درون دیوار یخی بیرجند
- رئیس سازمان بازرسی: در حال تجمیع تجربههایی در زمینه مبارزه با فساد هستیم
- رئیس مرکز اسناد انقلاب: مردم دیگر از بازنویسی کتابها استقبال نمیکنند
- زادبر: تحریف تاریخ معاصر از آسیبهای هویت ملی امروز ماست
- گلعلی بابایی: دفاع مقدس میتواند اقتباس را در سینمای ایران زنده کند
- استقبال مخاطبان از «۵ دقیقه با بهشتیان» و «مجید بربری» در غرفه دارخوین
- محمدی: ۴٠ اثر درباره آتشنشانی در نمایشگاه کتاب موجود است
- نویسندهای که اصرار دارد خودش کتابهایش را بفروشد + عکس
- چین: همکاری امنیتی و ضد تروریسم با پاکستان افزایش مییابد
- هند تامین کننده اصلی تسلیحات مورد نیاز ارمنستان شده است
- «حادثهای سخت» برای نظامیان اسرائیلی در شمال غزه
- ورود فراجا برای تأمین امنیت حوزههای آزمون؛ همه حوزههای امتحانات مجهز به دوربین مداربسته، راکت برای بررسی بدنی و سیگنال یاب هستند
- خاموشیهای اضطراری در «کییف» و دیگر شهرهای اوکراین
- کرمان از بهترین مناطق برای سرمایهگذاری در انرژیهای تجدیدپذیر است
- آنروا فریاد نیاز آوارگان غزه به آب و غذا را نمیشنود
- ایرلند: حمله به کاروانهای امدادرسانی غزه وحشتناک است
- پاشینیان: ارمنستان و جمهوری آذربایجان از اولین روزهای استقلال باهم در تضاد بودهاند
- ژنرال صهیونیست: ارتش قادر به نابودی حماس یا دور کردن خطر حزبالله نیست
- مالزی: «حتی یک سند کوچک» برای انتقال پنهانی نفت ایران وجود ندارد
- کدام مناطق استان قزوین بیشترین بارندگی را داشتند؟
- لاپید: بازگرداندن ربوده شدگان از عملیات نظامی در رفح مهمتر است
- اتحادیه اروپا حامی «حق اسرائیل برای دفاع از خود»
- ادامه اختلافات ارمنستان و جمهوری آذربایجان بر سر موارد مهم
- خسارت ۷۰ درصدی تگرگ به باغات روستای «دهنه شیرین» باموصفیآباد
- وزارت دفاع جمهوری آذربایجان: نیازی به صلحبانان در قرهباغ نیست
- کارگزاران حج بدانند، فرامین رهبر انقلاب در خصوص حج فصلالخطاب است
- چین: امروز ظلم علیه فلسطینیان بدتر شده است
- اوضاع فاجعه بار آوارگان رفح در سایه نبود سوخت و غذا
- رئیس مرکز بررسیهای استراتژیک ریاست جمهور: برای هر کاری پیوست امیدآفرینی داشته باشیم
- حضور گسترده ایران در اجلاس اقتصادی روسیه-جهان اسلام
- سوئیس: دهها کشور حضور در کنفرانس صلح اوکراین را تایید کردهاند
- نمایشگاه «رویش زندگی» در ۳۰۰ نقطه کشور برگزار میشود
- تشویق مدیران خوب و خلاق از سوی سازمان بازرسی فراموش نشود
- مشکل سایت ۱۰۸ هکتاری برای مسکنسازی در کرمان برطرف شد
- یونیسف: نیمی از ۱.۷ میلیون آواره در غزه کودک هستند
- ۶۱ درصد انتشار ذرات معلق شهر تهران سهم وسایل نقلیه است
- لزوم تعریف ابزار مواخذه دولت در زیاندهی شرکتهای دولتی
- به زودی نخستین «نیروگاه خورشیدی تجمیعی» مددجویان کمیته امداد در هرمزگان افتتاح میشود
- بانک کانادا سهام خود را در اسلحهسازی اسرائیل به نصف کاهش داد
- مدرسخیابانی: تشکیل شورای عالی سرمایهگذاری ضروری است
- وزیر سابق اسرائیلی: سردرگمی کابینه نتانیاهو باعث ایجاد شکاف در اسرائیل شده است
- تزریق اعتبار دولت سیزدهم به بیمارستان رازی قائمشهر و پایان انتظار ۱۶ساله مردم مازندران
- تذکر نسبت به زیان ۸ میلیارد دلاری صندوق توسعه ملی در ترکیب ارزی
- تشریح وضعیت شهرکهای صنعتی اردبیل، از اشتغالزایی ۱۳ هزار نفری تا فعال بودن ۸۰ درصد واحدهای تولیدی
- دیپلماسی فعال شود، صادرات دانش دو برابر خواهد شد
- هنیه: عملیات طوفان الاقصی سرآغاز آزادسازی فلسطین است
- شفافیت تسهیلات شرکتهای دولتی در گرو اصلاح ساختار ترازنامه بانکها
- فایننشال تایمز: اقتصاد عربستان تحقق چشمانداز ۲۰۳۰ را دشوار کرد
- فهرست انتظار بانکها برای پرداخت وام ساخت مسکن یک میلیونی شد
- روایت فرید زکریا از آینده انتخابات ریاستجمهوری آمریکا
- روسیه: خروج کامل نیروهای روس از ارمنستان صحت ندارد
- تیم جنگزده با کدام فوتبالیستها راهی یورو ۲۰۲۴ میشود؟
- اهداف پیاسجی برای پر کردن پست امباپه مشخص شد: ۳ ستاره از سری آ و یک ستاره از لیگ برتر
- پرز با انتقال این بازیکنان در دو فصل آتی کهکشانی جدید خواهد ساخت
- بارلا با افعیها میماند
- ستاره سابق شیاطین سرخ احتمال آمدن سرمربی ۳ شیرها به الدترافورد را رد کرد
- شیاطین سرخ دز پی آوردن بازیکن موزامبیکی روخیبلانکوس
- عملکرد عالی مهاجم مارسی ختم به جام نشد
- نراتزوری در پی انتخاب سنگربان سلسائو به عنوان دروازهبان اول خود
- نقشه بلوگرانا برای تقویت کمربند میانی در فصل آینده
- عملکرد خوب دکتلار سران الهه را پای میز مذاکره آورد
- دوپراز خطاب به پیاسجی: چرا به یک بازیکن ۲۳ این همه قدرت دادید؟
- ژاوی دوست دارد محصولات لاماسیا به کاتالان برگردند
- فولبک اسپانیایی ذهن و قلب ده روسی را ربود
- ریچارلیسون راهی تیم قهرمان لیگ عربستان میشود؟
- پالمر: علاقهمندم با سه شیرها در یورو ۲۰۲۴ باشم
- رکوردزنی در کلین شیتهای لالیگا با وجود استقفاده از بازیکنان متغییر در دروازه و دفاع
- مالک قطری همچنان در تلاش برای گرفتن پول از امباپه است
- چلسی و منچستریونایتد هدف برنامههای توخل؛ توماس علاقهمند به بازگشت به لیگ جزیره
- ایمانول: زوبیمندی از سوسیداد خارج نمیشود
- کاپیتان بلژیک هنوز اعتقادی به لیگ روشن ندارد
- سرمربی طارمی: من به تازگی قراردادم را تمدید کردم لطفاً در این مورد صحبت نکنید
- بالده هدف سودآوری تیم کاتالانی قرار گرفت
- لوپز سران بلوگرانا را پای میز مذاکره کشاند
- لوسبلانکوس، میخواهد شاگرد آلونسو را اغوا کند
- رهبر نیمکت عقابها هم به مونیخیها پشت کرد
- وینگر آلمانی اماچپی آرنا هدف شیرهای لندنی
- کاسمیرو نباید رئال را ترک میکرد
- مهاجم سنگالی آّبیهای لندن از دروگبا عبور کرد
- ملیپوش برزیلی بلوگرانا با یک پیشنهاد جذاب از لیگ جزیره کاتالان را ترک میکند
- بلوگرانا با دستمزد لواندوفسکی برای فصل بعد مشکل دارد
- اسطوره شیرهای لندنی از پشت پوچتینو درآمد
- ۷ ستاره اصلی بلوگرانا به درهای خروج هدایت میشوند
- خبرنگار مشهور جزئیات انتقال امباپه را فاش کرد
- درخواست مکرون از باشگاه اسپانیایی برای المپیک ۲۰۲۴
- مهمانان ناخوانده لیگ جزیره با هم سقوط کردند
- این تیم آلمانی بعد از ۱۲۳ سال راهی سطح اول فوتبال شد
- قانونی خاص در MLS که صدای مسی را درآورد
- دوستاره رئال سر بهترین بازیکن جهان تعارف میکنند
- افسانه لوکیتا در برنابئو پس از ۱۲ سال مختومه میشود
- بارسلونا برای پست شماره ۶ از بوکاجونیورز بازیکن میگیرد
- کاراگر: بهتر بود هویلوند قبل از آمدن به اولدترافورد ۲ سال در تیم دیگری بازی میکرد
- تولد ۳۶ سالگی مارسلو، رکوردار جام در تاریخ لوسبلانکوس
- ستاره آبیهای لندن در اولین فصل حضورش از یک رکورد عبور کرد
- اظهارات مالک قطری پیاسجی پس از ۱۰ ماه برعکس شد
- ساکی: به کارلتو زنگ زدم و گفتم چرا ما را زجر کُش میکنی!
- کاپیتان الهلال رکورد سیدجلال حسینی ار تهدید کرد
- این مراکشی در رئال به مارادونا ملقب شد + عکس
- خاکپو خریدی ارزان اما با تأثیرگذاری زیاد برای قرمزهای بندر مرسی ساید
- بلوگرارنا در حال ارزیابی دستمزد درخواستی ستاره بیلبائو
- مدافع زنبورها از وینیسیوس هم بهتر بود