۲۰ مهر ۱۴۰۴
اخبار پزشکی سلامت
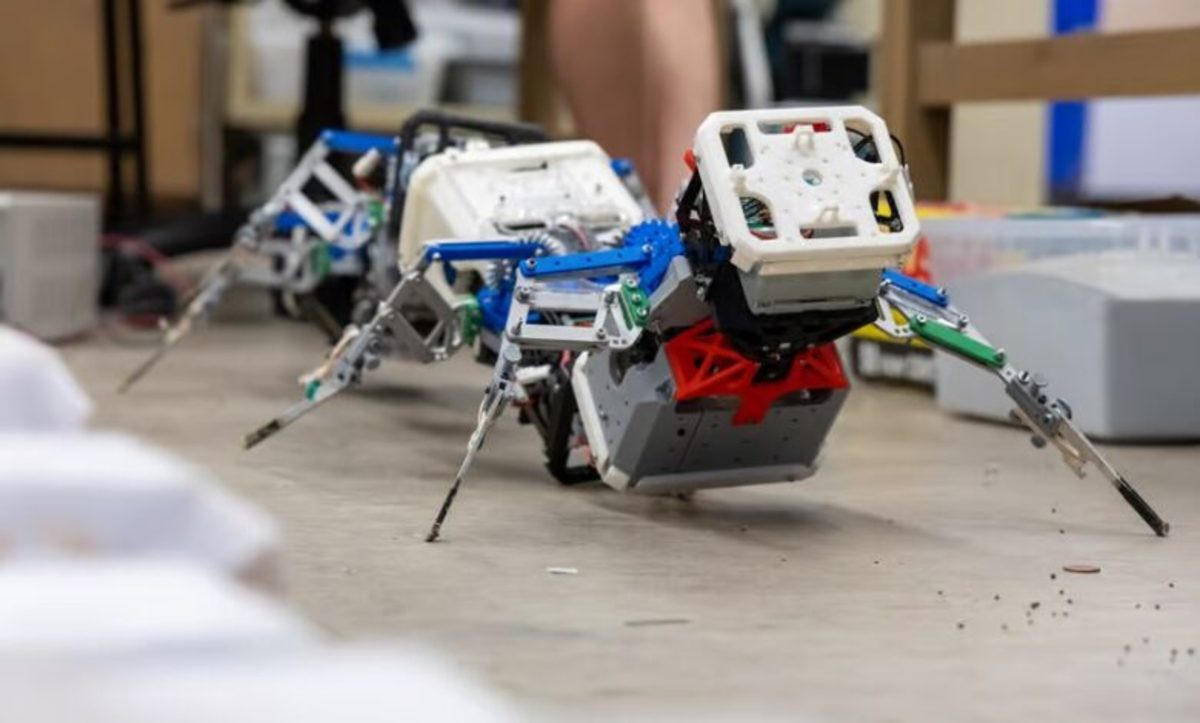
به گزارش مجله خبری نگار،تیمی در موسسه فناوری جورجیا (Georgia Tech) به رهبری محقق فیزیک، باکسی چونگ (Baxi Chong) این ربات را برای سناریوهای متفاوت طراحی کردند که در آن سنسورها ممکن است بسیار شکننده یا گران باشند یا شرایط محیطی ممکن است خیلی سریع تغییر کند و سیستمهای کنترل نتوانند با آن سازگار شوند.
دانشمندان از نظریه ارتباطی ارائه شده توسط ریاضیدان مشهور کلود شانون الهام گرفتند که پیشنهاد میکرد؛ برای انتقال یک پیام در مسافت طولانی روی یک خط پر سر و صدا، آن پیام باید به واحدهای اضافی تکرار شونده تقسیم شود.
در مورد ربات، آن واحدها به شکل پا بودند. محققان کار خود را با رباتی با شش پا آغاز کردند که باید راه خود را بر روی سطحی ناهموار طراحی شده برای تقلید از یک محیط طبیعی آشفته باز میکرد. پس از هر مرحله، دانشمندان یک جفت پای اضافی به ربات اضافه کردند تا اینکه در نهایت ربات در مجموع ۱۶پا داشت.
در ادامه مشخص شد که وقتی ربات پاهای بیشتری به دست میآورد، در عبور از موانع به طور فزایندهای بهتر میشود. نکته مهم این است که این کار را بدون استفاده از هیچ سنسور یا برنامه نویسی تطبیقی انجام داد. در عوض، فقط بر این واقعیت تکیه داشت که اگر یک یا حتی چند تا از پاهایش میلنگند، باز هم تعداد زیادی پای دیگر وجود خواهند داشت تا آن را به حرکت درآورند.
نیازی به گفتن نیست که در برخی مواقع هزینههای چند پا بیشتر از مزایای آن خواهد بود. دانشمندان هنوز مشخص نکرده اند که این نقطه برای رباتهای مختلف که وظایف متفاوتی را در محیطهای مختلف انجام میدهند، کجاست.
چونگ در پایان گفت: در این مطالعه، ما ثابت کردیم که حداقل تعداد پا وجود برای عملیات بدون مشکل وجود دارد، اما تعداد دقیق پاهای مورد نیاز را نمیدانیم. علاوه بر این، ما باید مبادله بین انرژی، سرعت، قدرت و استحکام را در چنین سیستم پیچیدهای بهتر درک کنیم.