
۱۸ آبان ۱۴۰۳
اخبار اقتصادی
به گزارش مجله خبری نگار از پایگاه خبری فیز (phys)، تیم پژوهشی گروه آموزشی (دپارتمان) شیمی دانشگاه علم و فناوری پوهانگ در کره جنوبی، قصد دارد رباتهای واقعی را با عضلات مصنوعی تجهیز کند.
قدرت و سرعت بالای عضلات مصنوعی قابل تحقق نیست؛ زیرا قدرت مکانیکی (نیرو) و رسانایی (سرعت) الکترولیت پلیمری، یعنی مواد کلیدی عملگر، دارای ویژگیهای متناقضی هستند. تیم پژوهشی کرهای، نوعی الکترولیت پلیمری طراحی کردهاند که میتواند برهمکنشهای پیوند یونی و هیدورژنی انجام دهد و در نتیجه حل این تناقضات را ممکن کند.
عضلات مصنوعی، رباتها را قادر میسازند که اندامهایشان را به صورت طبیعی مانند انسانها حرکت دهند. برای بهحرکت درآوردن این عضلات مصنوعی، به یک عملگر نیاز است که در شرایط ولتاژ پایین، تبدیل مکانیکی را نمایش دهد.
به دلیل ماهیت الکترولیت پلیمری استفادهشده در عملگر، قدرت و سرعت به طور همزمان قابل دستیابی نیست؛ زیرا افزایش قدرت عضلانی باعث کاهش سرعت کلیدزنی و افزایش سرعت باعث کاهش قدرت میشود.
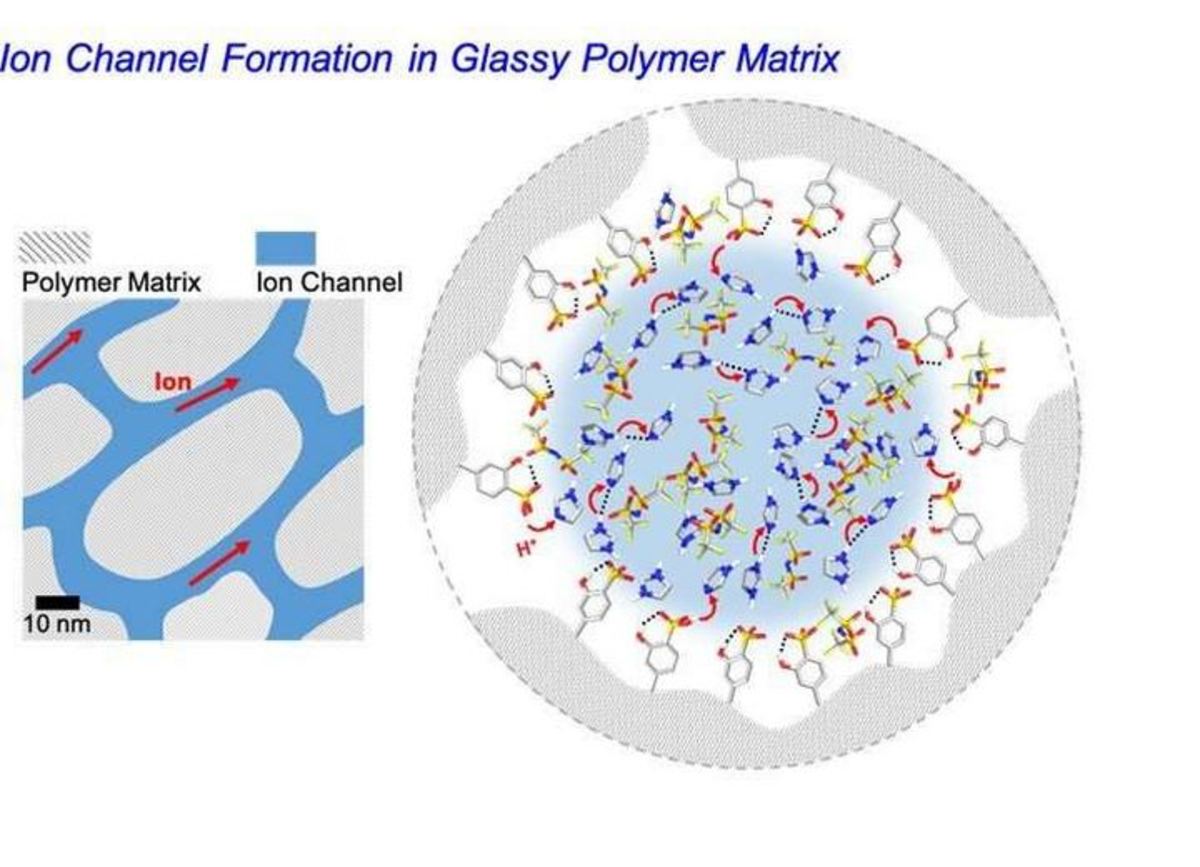
تحقیق تیم پژوهشی کرهای به منظور غلبه بر محدودیتهای موجود، مفهوم خلاقانه پلیمر دوکاره را معرفی کرد. با تشکیل یک کانال یونی یکبعدی به عرض چندین نانومتر در داخل ماتریس پلیمری، که به سختی شیشه است، یک الکترولیت پلیمری فوق یونی با رسانایی یونی زیاد و استحکام مکانیکی بهدست آمد.
این یافتهها دارای پتانسیل ایجاد نوآوریهایی در رباتیک نرم و فناوری پوشیدنی هستند؛ زیرا میتوان آنها را برای طراحی یک عضله مصنوعی به کار برد که یک باتری قابل حمل (۱/۵ ولت) به آن متصل میشود و کلیدزنی سریع در چندین میلیثانیه (هزارم ثانیه) و قدرت زیادی را تولید میکند. علاوه بر این، انتظار میرود این نتایج در نسل بعدی دستگاههای الکتروشیمیایی حالت جامد و باتریهای فلزی لیتیومی بسیار پایدار اعمال شوند.
































































































 CJ Logistics سه ماهه سوم با افزایش معاملات تحویل، ۳.۹ درصد سود به دست آورد.")




























