
۰۵ آذر ۱۴۰۴
اخبار علمی آموزشی
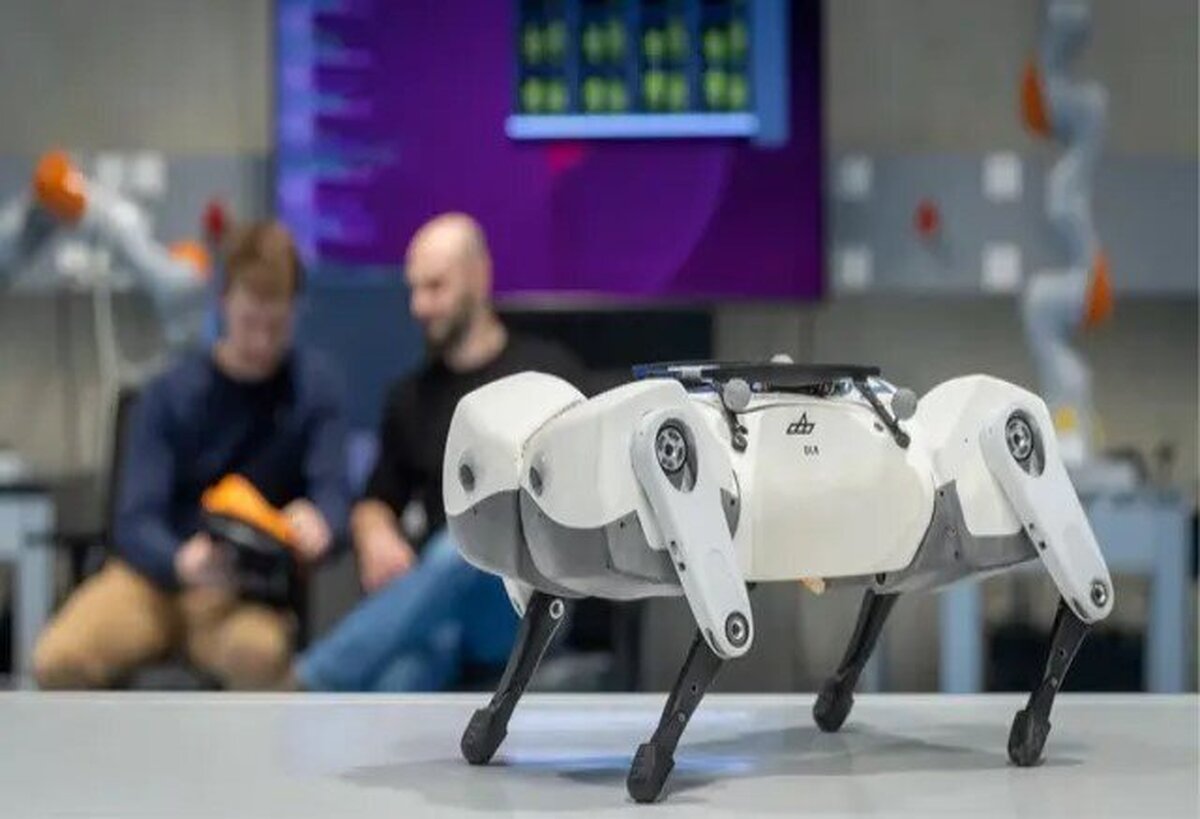
به گزارش مجله خبری نگار/ابزار ابداعی محققان دانشگاه فنی مونیخ به انجام حرکات با مصرف انرژی کم کمک میکند. محققان آن را روی یک سگ روباتیک به نام «برت» آزمایش کردند. برت با اتکا بر الگوهای نوسان طبیعی و زمانبندی دقیق حرکات سریعتر و پویاتری انجام داد و عملکرد آن از روباتهایی که از روشهای سنتی برای نشان دادن چابکی استفاده میکردند، بهتر بود.
به گفته محققان این نوآوری به روباتها اجازه میدهد کارامدتر حرکت کنند و راحتتر شیوه حرکات انسان و حیوان را تقلید کنند.
ابزار ابداعی محققان دانشگاه فنی مونیخ روی یک سگ روباتیک کوچک که توسط مرکز هوافضای آلمان ابداع شده بود، آزمایش شد. هدف این تحقیق توسعه کارآمد و انطباق پذیر حرکات پاها بود.
راه رفتن و جهیدن نمونههایی از ۶ الگوی حرکتی نیازمند به انرژی اندک هستند که محققان برای روبات برت یافتهاند. این الگوها با نوسان ذاتی ربات مطابقت دارد و نشان میدهد که استفاده از این ریتمهای ذاتی برای ایجاد راه رفتن کارآمد امکان پذیر است.
این حرکات در سیستمهای سایشی دنیای واقعی با استفاده از پالسهای دقیق انرژی که توسط یک تنظیم کننده که با رایانه کنترل میشد، انجام شد. این روش شبیه سازی رفتار والدینی است که کودک را روی تاب هل میدهند، اما اجرای آن برای رباتها نیازمند دقت بالا است تا همان زمانبندی به وجود بیاید.
به گفته محققان موفقیت این روش در یک مقایسه بین ۳ روبات برت نمایش داده بود. روباتی که با روش جدید برنامه ریزی شده بود، سریعتر از همتایانش حرکت میکرد و پویاتر بود. این امر نشان دهنده پتانسیل استفاده از روش حرکت مبتنی بر نوسان طبیعی در روبات هاست.






































































































